
Designing robots to improve mobility.
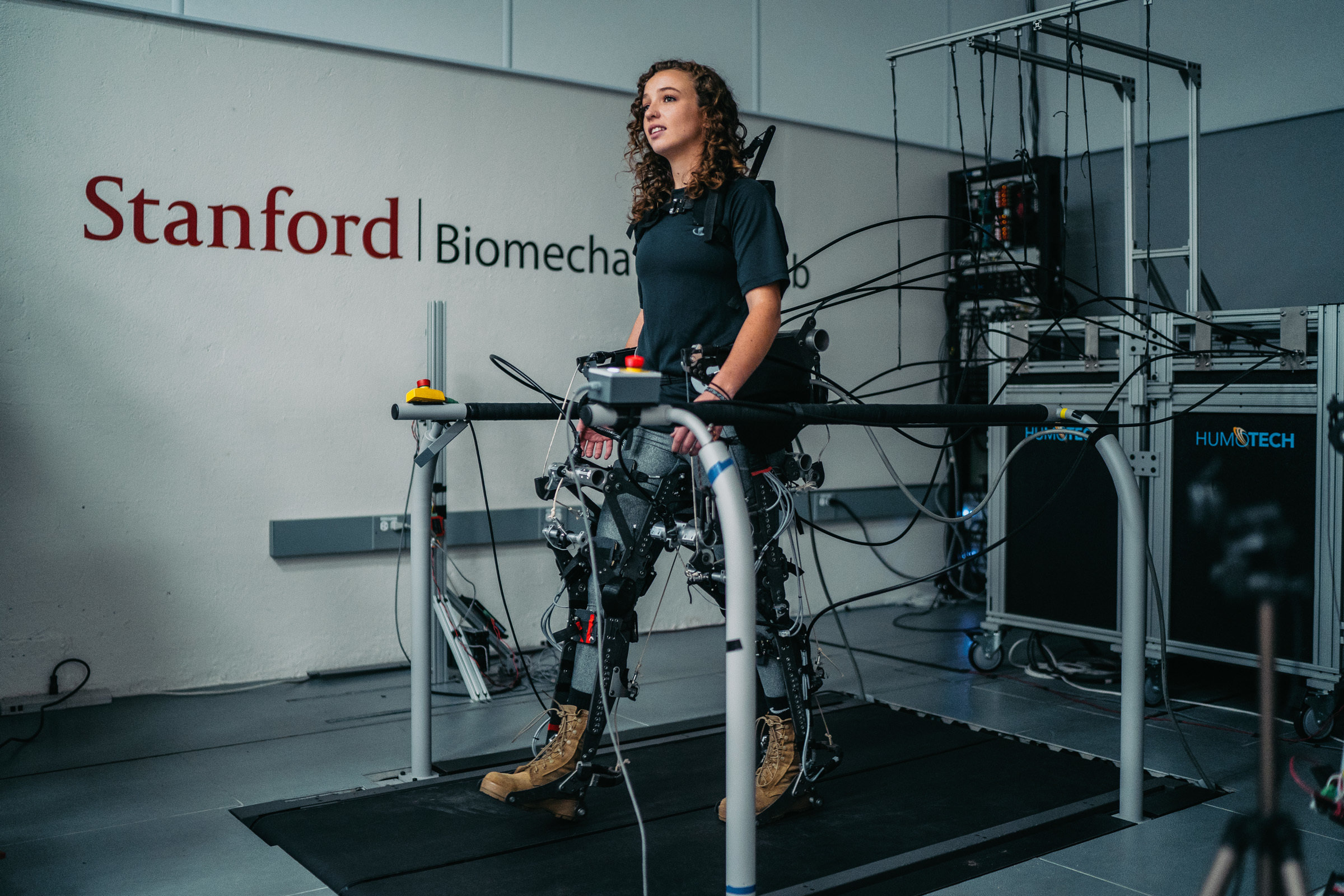
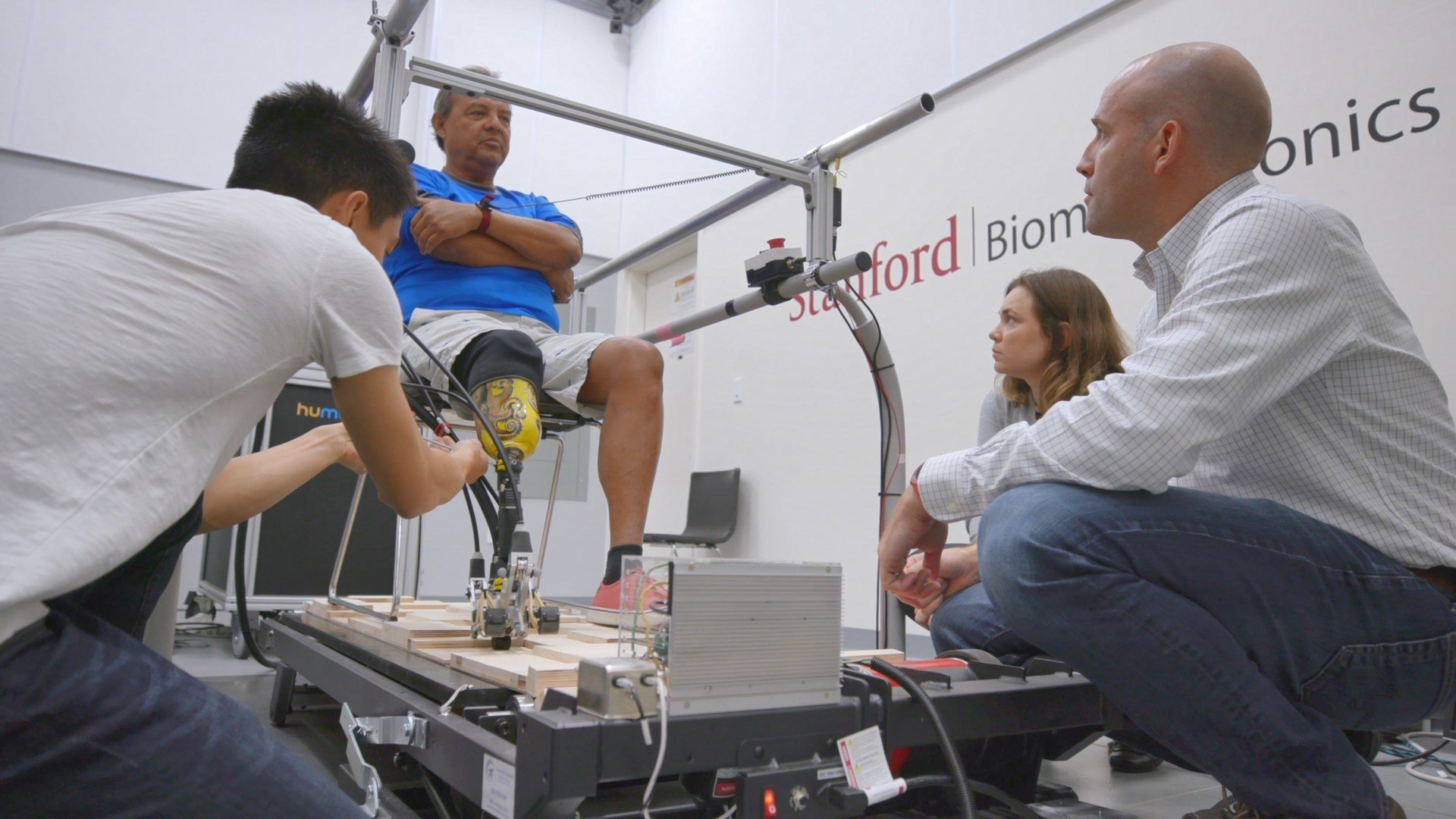
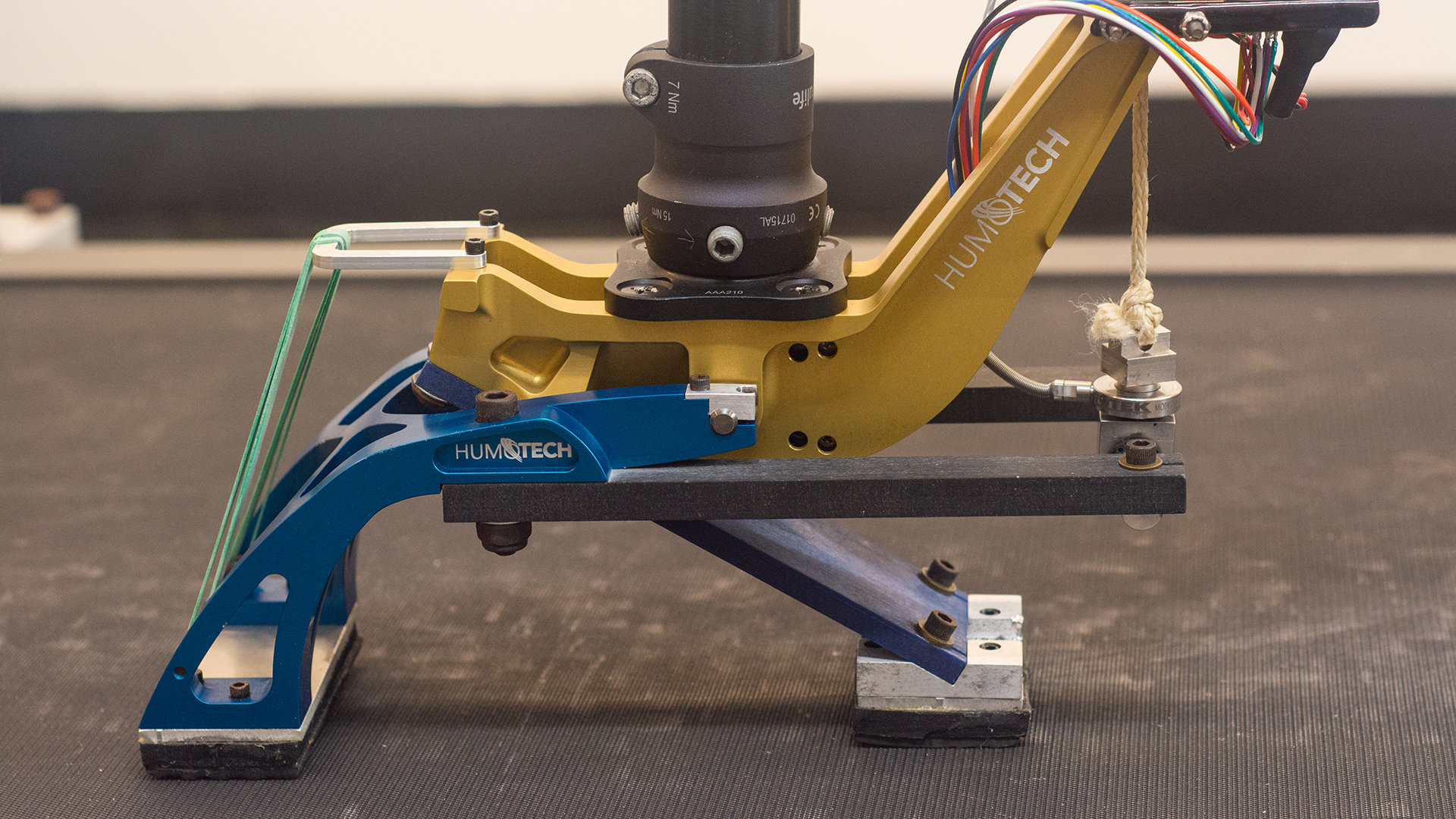
We develop wearable robots to improve efficiency, speed and balance while walking and running, especially for people with disability. Our primary focus is to speed and systematize the design process itself by developing versatile prosthesis and exoskeleton emulators and algorithms for human-in-the-loop optimization. We perform basic scientific research on related topics, for example the role of ankle push-off in balance and the effects of arm swinging on energy economy. We develop efficient autonomous devices, such as energy-efficient walking robots, ultra-low-power electroadhesive clutches, and unpowered exoskeletons that reduce the energy cost of walking. We work with spin-out companies to translate our results into products. You can learn more by visiting our Publications Page, which links to manuscripts, videos, designs, data, and other materials from our research. For a high-level perspective on our lab, please see the Laboratory Overview Video.
Glimpses of our Research:
















Thank you to our sponsors, which currently include Stanford HAI, Honda, David and Claudia Wang, and Vic and Sue Althouse, and have previously included the National Science Foundation, Army Research, Nike, Panasonic, and the National Institutes of Health.